
Theory
Introduction:
A servo motor is a rotational or translational motor to which power is supplied by a servo amplifier and serves to apply torque or force to a mechanical system, such as an actuator or brake. Servo motors allow for precise control in terms of angular position, acceleration, and velocity. This type of motor is associated with a closed-loop control system. A closed-loop control system considers the current output and alters it to the desired condition. The control action in these systems is based on the output of the motor. It uses a positive feedback system to control the motion and final position of the shaft.
Types of Servo Motors:
Servo motors come in various types, each catering to specific applications based on their design, control mechanisms, and operational characteristics. The two primary types are AC servo motors and DC servo motors.
AC Servo Motors:
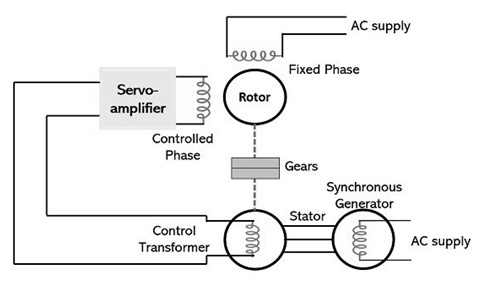
An AC servo motor is an electromechanical device that converts alternating current (AC) electrical energy into mechanical motion. It typically comprises a stationary stator with multiple windings and a movable rotor equipped with permanent magnets or wound poles. When energized with AC voltage, the stator windings produce a rotating magnetic field, which interacts with the rotor's magnetic field, inducing rotational motion. AC servo motors require sophisticated control systems to modulate the frequency and amplitude of the applied AC voltage, enabling precise regulation of speed, position, and torque. These motors are commonly used in heavy-duty industrial applications such as CNC machining, robotics, and large-scale automation systems where high torque and precise control are essential.
DC Servo Motors:
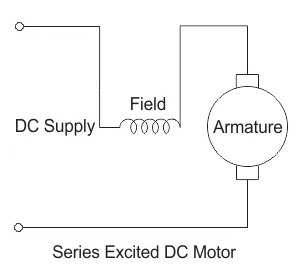
A DC servo motor is an electromechanical device that converts direct current (DC) electrical energy into mechanical motion. It typically consists of a wound stator and a rotor equipped with permanent magnets or wound poles. When DC voltage is applied to the stator windings, a magnetic field is generated, interacting with the rotor's magnetic field to produce rotational motion. DC servo motors offer simpler control mechanisms compared to their AC counterparts, with control achieved by varying the magnitude and polarity of the applied DC voltage, often using pulse-width modulation (PWM) techniques. These motors are commonly used in smaller-scale systems and applications such as robotics, aerospace, medical devices, and other precision equipment where compact size, simplicity, and cost-effectiveness are crucial.
Components and Construction of Servo Motor:
The construction of a servo motor involves many key components that are used to enable precise control of angular position. A servo motor is similar to a regular motor, but it has more additional parts to facilitate position control. These essential components include sensors, gears, and a circuit. The motor is guided by a controller, such as Arduino or STM. In industrial applications, AC servo motors utilize an encoder as a position sensor, while DC servo motors employ a potentiometer for this purpose.
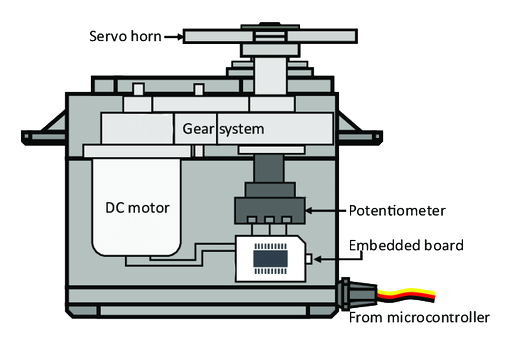
A DC servo motor is assembled by combining a DC motor with various components like a gearbox, controller, and potentiometer. On the other hand, an AC servo motor uses an induction motor, complemented by gears and encoders for precise control. Following are the components of DC Servo motor:
1. Stator: The stator is the stationary part of the servo motor and houses the electromagnetic coils. These coils generate a magnetic field when electric current passes through them. The stator's magnetic field interacts with the rotor's magnetic field to produce motion.
2. Rotor: The rotor is the rotating part of the servo motor and is connected to the output shaft. It typically contains permanent magnets or has wound poles. The interaction between the stator's magnetic field and the rotor's magnetic field causes the rotor to rotate, thereby driving the output shaft.
3. Feedback Device: Many servo motors incorporate a feedback device to provide information about the rotor's position to the control system. This feedback mechanism allows for closed-loop control, enabling the motor to accurately reach and maintain the desired position. Common types of feedback devices include potentiometers, encoders, and resolvers.
4. Gear Train: Some servo motors feature a gear train between the rotor and the output shaft. The gear train serves to increase torque and reduce the speed of the output shaft, providing mechanical advantage and precision. The gear ratio can be adjusted to match the requirements of the application.
5. Control Circuitry: Servo motors include control circuitry responsible for interpreting the input signals and generating the appropriate output to drive the motor. This circuitry typically comprises a microcontroller or dedicated servo driver chip. It processes commands from the external control system and regulates the motor's speed, position, and torque accordingly.
6. Input Connections: Servo motors have input connections for power and control signals. The power connection supplies the necessary electrical energy to drive the motor, while the control signals dictate the desired position or speed of the motor. Control signals are often in the form of pulse-width modulation (PWM) signals.
7. Output Shaft: The output shaft of the servo motor is where the mechanical motion is transferred to external components or mechanisms. It may feature various attachment options, such as splines, keyways, or threaded holes, to facilitate coupling with other equipment.
8. Housing: The entire assembly of the servo motor is enclosed within a housing, which provides mechanical protection and environmental sealing. The housing may also incorporate mounting provisions for easy installation in various applications.
Working of Servo Motor:
A servo motor works in a simple way and is easy to understand. Usually, a servo motor has a system called closed-loop control. This system includes a comparator and a feedback path. It’s like a setup that constantly checks and adjusts the motor to keep it in the right place. The comparator is an important part of the servo motor. It carefully checks where the motor is right now and compares it to where it’s supposed to be. If there’s a difference, it signals that there’s an error, telling the motor to make the necessary adjustments to get to the correct position.
The block diagram below shows the components of a standard servo motor control system:
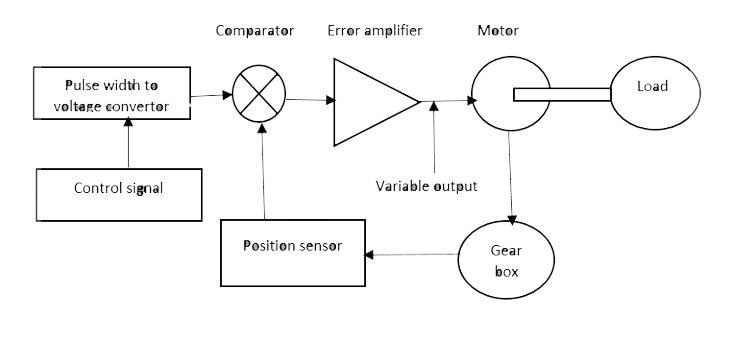
Servo motors are commonly controlled using a method called Pulse Width Modulation (PWM). This technique requires the transmission of an electrical signal containing pulses of different lengths to the motor. These pulses have a width that varies between 1 to 2 milliseconds, and they are sent repeatedly at a rate of 50 times per second to the servo motor. The adjustment of the pulse width serves as a means to effectively control the position of the rotating shaft in the servo motor. In simpler terms, changing the duration of these pulses guides the motor in achieving the desired position for its rotating shaft.
Characteristics of Servo Motors:
Servo motors possess several characteristics that make them suitable for a wide range of applications, particularly those requiring precise control over position, speed, and torque. Here are some key characteristics of servo motors:
1. Precision Control:
Servo motors are known for their ability to provide precise control over position, velocity, and acceleration. This precision is achieved through feedback mechanisms, such as potentiometers or encoders, which continuously monitor the motor's position and provide feedback to the control system.
2. Light-Sensitive Alarms:
Servo motors typically have a high torque-to-inertia ratio, meaning they can generate significant torque relative to their size and weight. This characteristic makes them well-suited for applications where rapid acceleration and deceleration are required.
3. High-Speed Operation:
Servo motors can operate at high speeds, allowing for fast response times and dynamic motion control. The combination of high speed and precise control makes them ideal for applications such as CNC machining, robotics, and automation.
4. Closed-Loop Control:
Servo motors operate in a closed-loop control system, where feedback from sensors is used to adjust the motor's performance in real-time. This closed-loop control ensures accurate positioning and minimizes errors caused by external disturbances or variations in load.
5. Low Electrical Noise:
Servo motors generally produce low electrical noise, making them suitable for use in applications where electromagnetic interference (EMI) must be minimized, such as medical devices or sensitive electronic equipment.
6. Compact Design:
Servo motors are often designed to be compact and lightweight, making them suitable for applications where space is limited or where mobility is required, such as in robotics or aerospace systems.
7. Customizable Performance:
Servo motors are available in various sizes, power ratings, and configurations to suit different application requirements. Additionally, their performance characteristics, such as speed, torque, and acceleration, can often be customized to meet specific needs.
8. Energy Efficiency:
Servo motors can be highly energy-efficient, especially when combined with modern control algorithms that optimize power consumption based on operating conditions. This energy efficiency is beneficial for reducing operating costs and environmental impact.
Applications of Servo Motor:
Servo Motors have a wide range of applications across industries. Let’s explore some of the common applications of servo motors:
1. Robotics:
Servo motors are used in robot arms, grippers, and joints to achieve accurate positioning and smooth motion. This enables robots to perform tasks with precision, such as assembly, welding, and material handling.
2. CNC Machines:
Servo motors are extensively used in Computer Numerical Control (CNC) machines. They control the movement of the cutting tools, ensuring precise and consistent machining operations. The servo motors enable high-speed positioning and accurate control over the cutting process, resulting in superior quality and productivity.
3. Industrial Automation:
They are used in conveyors, packaging machines, printing presses, and other automated equipment. The precise control offered by servo motors ensures efficient and reliable operation, improving productivity and reducing downtime.
Advantages of Servo Motor:
A servo motor is a highly efficient and versatile motor that offers several advantages. Here are some of the key benefits:
1. Precision Control: Servo motors provide precise control over position, speed, and torque, making them ideal for applications that require high accuracy and repeatability.
2. High Torque: Servo motors can deliver high torque even at low speeds, making them suitable for tasks that require high force and power.
3. Fast Response: Servo motors have a quick response time, allowing them to quickly adjust to changes in load or speed.
4. Wide Speed Range: Servo motors can operate at a wide range of speeds, from very low to very high, making them versatile for various applications.
5. Energy Efficiency: Servo motors are designed to be energy efficient, consuming less power when not in use and reducing overall energy costs.
Disdvantages of Servo Motor:
While servo motors offer numerous advantages, there are also some disadvantages to consider:
1. Complex Control:
Servo motors require complex control systems and feedback mechanisms, such as Bode Plots in Control Systems, which can increase the overall complexity and cost of the system.
2. Higher Cost:
Compared to other types of motors, servo motors tend to be more expensive due to their advanced features and precision control.
3. Size and Weight:
Servo motors are generally larger and heavier than other types of motors, which may limit their use in certain applications with space constraints.
4. Heat Generation:
Servo motors can generate significant heat during operation, requiring additional cooling measures to prevent overheating.
5. Noise:
Depending on the design and quality of the servo motor, it may produce some noise during operation, which can be a concern in noise-sensitive environments.
Circuit for Interfacing of the Servo Motor with Arduino:
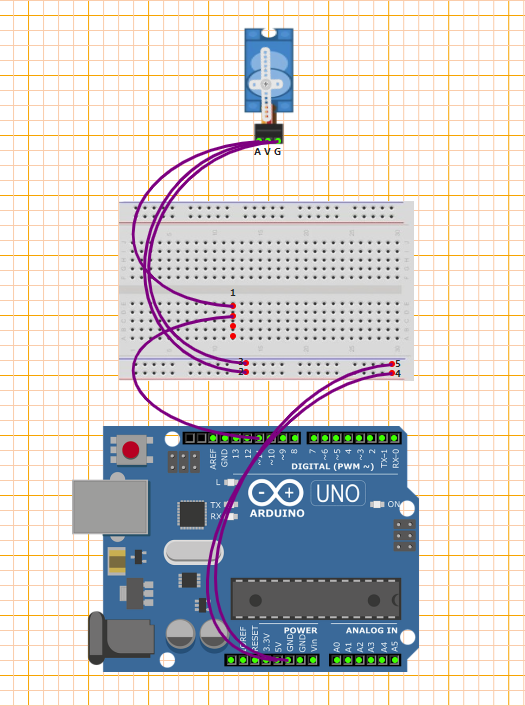
Working of the Circuit:
1. Include Servo Library:
- #include <Servo.h> imports the Servo library, which provides functions to control servo motors.
2. Servo Object Declaration:
- Servo servoMotor; declares an object named servoMotor of type Servo, which will be used to control the servo motor.
3. In the Setup Function:
- servoMotor.attach(11); attaches the servo motor to digital pin 11 on the Arduino board.
4. In the Loop Function:
- • Rotate Servo from 0 to 180 Degrees: A for loop iterates from 0 to 180 degrees. Inside the loop, servoMotor.write(angle); sets the angle of the servo motor to the current value of angle. delay(15); introduces a delay of 15 milliseconds to allow the servo motor to reach the desired position gradually.
- • Rotate Servo from 180 to 0 Degrees: Another for loop iterates from 180 to 0 degrees. Similarly, servoMotor.write(angle); sets the angle of the servo motor to the current value of angle. delay(15); introduces a delay of 15 milliseconds for smooth movement.
The code effectively sweeps the servo motor back and forth between 0 and 180 degrees, pausing briefly at each angle to allow the motor to reach its position smoothly.
In summary, this experiment demonstrates how to control the rotation angle of a servo motor using an Arduino. This capability can be useful in various applications such as robotics, automation, and remote-controlled systems where precise control of motor position is required.